





Description
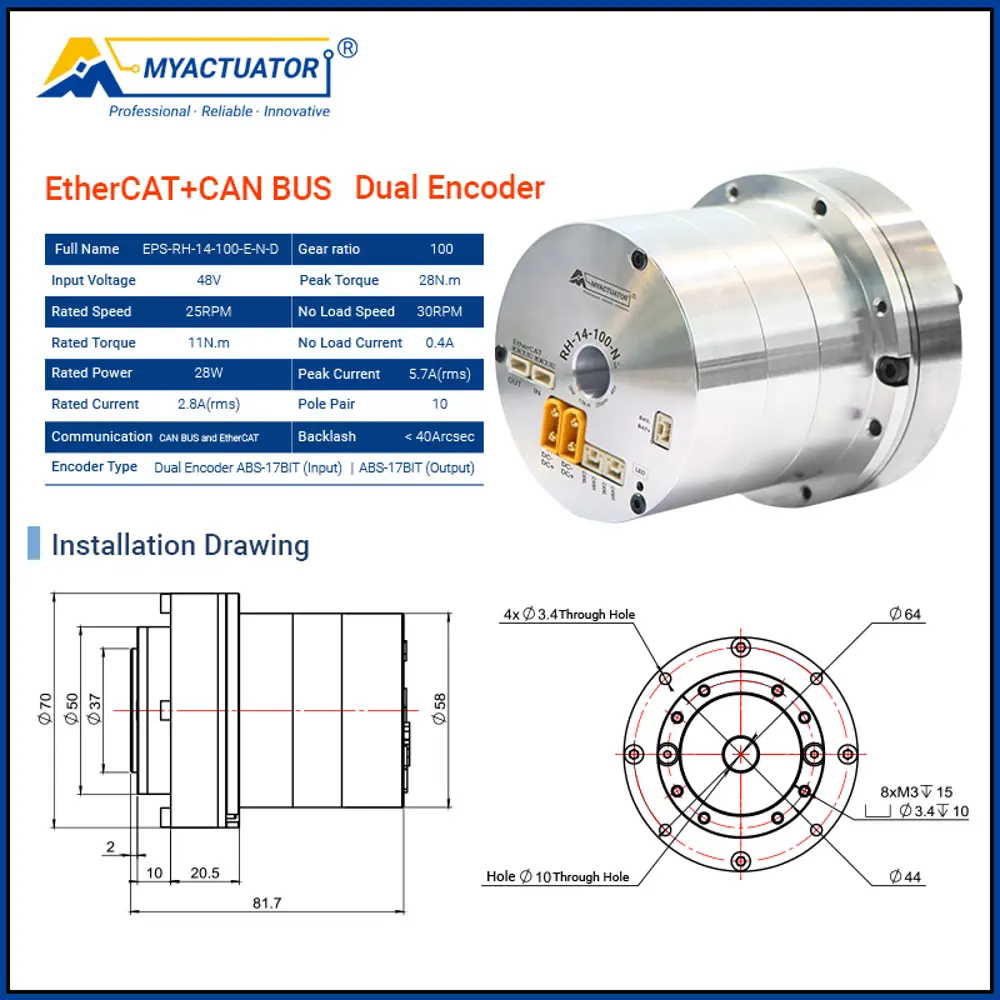
- Equipped with EtherCAT Gigabit bus + CAN dual communication protocol
- Collaborative robot joint module Precision assembly line direct drive unit
Myactuator RH-14-100-E-N-D adopts military-grade cross roller bearing design, which improves the bending moment resistance by 30%, and maintains 20 arc-second accuracy under 1500N extreme bending moment, making the robot arm as stable as a rock in complex working conditions. Equipped with EtherCAT Gigabit bus + CAN dual communication protocol, the command transmission rate reaches 100Mbps, and the synchronization cycle is shortened to 250μs, allowing the multi-axis linkage accuracy to break through the millisecond limit
Attached files

Reviews
There are no reviews yet.