


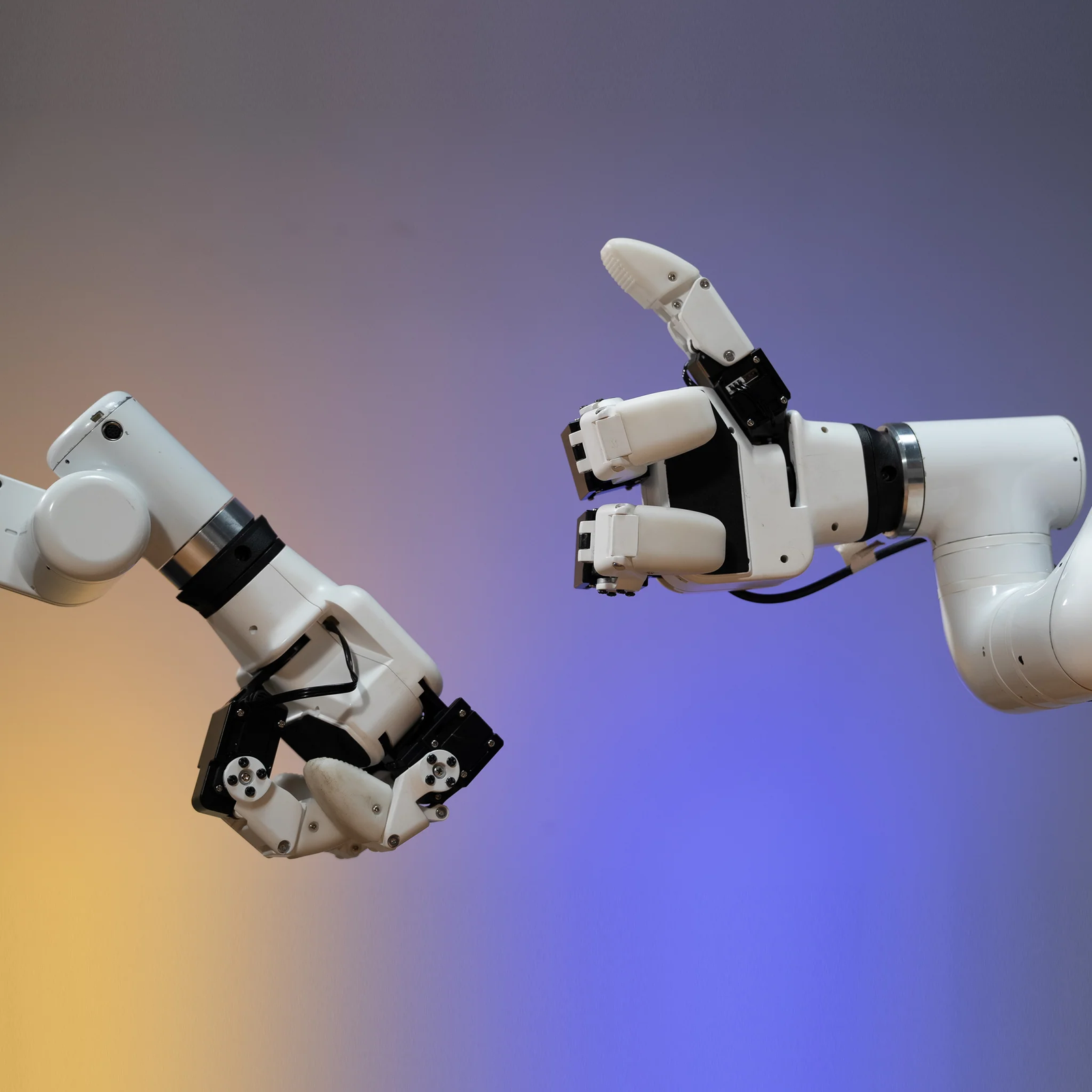



The myGripper H100 is a highly advanced 3-finger force-controlled dexterous gripper developed by Elephant Robotics, designed for precision, versatility, and intuitive control in robotics research, education, and experimental applications. Engineered with six high-performance digital servo motors, the H100 enables multi-parameter control, including output torque, motion speed, and absolute position, making it ideal for tasks requiring fine manipulation and adaptive grasping.
With a robust payload capacity of 500g and a stroke diameter of up to 130mm, the myGripper H100 can securely handle a wide variety of objects, from delicate fruits and food items to tools and laboratory equipment. Its three-finger design mimics the human thumb, index, and ring fingers, providing flexible grip patterns such as single-finger press, two-finger pinch or clamp, and three-finger grasp. The gripper supports high-frequency 100Hz communication for real-time status monitoring and data collection, fully meeting the needs of research and teaching environments.
The H100 is equipped with an ESP32 main control chip, offering 240MHz dual-core processing, Wi-Fi, and dual-mode Bluetooth connectivity. It features an M8 pin aviation connector for secure electrical interfacing and communicates via RS485 with MODBUS protocol, supporting communication speeds above 50Hz. The gripper is compatible with Python programming and provides a standardized robot driver library via PyPI, making integration and control straightforward. It also supports ROS1 and ROS2, including RVIZ simulation for real-time visualization and data collection.
Designed for durability, the myGripper H100 boasts a lifespan of over 1,000,000 cycles and is compatible with leading robotic arms such as the myCobot Pro 630 and Mercury series. Its modular design and comprehensive control options make it an ideal choice for hands-on learning, laboratory demonstrations, and advanced research projects.
Technical Specifications:
- Model: myGripper H100
- Number of Fingers: 3 (thumb, index, ring)
- Movable Joints: 6
- Payload: 500g
- Self-Weight: 780g
- Stroke (Diameter): –130mm
- Motion Speed: 60°/s per joint
- Motor Type: Digital servo (current, position, speed control)
- Lifespan: >1,000,000 cycles
- Electrical Interface: M8 pin aviation connector
- Power: 24V, 2A
- Communication: RS485, MODBUS, Hex, 8N1
- Communication Speed: >50Hz
- Main Control Chip: ESP32 (240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, Bluetooth)
- Programming: Python, ROS1/ROS2, RVIZ
- Compatible Models: myCobot Pro 630, Mercury series
What’s in the Pack:
- 1x myGripper H100 Three-Finger Dexterous Hand
- 1x Dual-Head 8-Pin Aviation Connector Cable
- 1x Extension Cable
- 1x USB to 485 Module
- 1x 8-Pin Aviation Connector with 2m Extension Cable
- 1x USB Data Cable
For step-by-step setup and programming guidance, visit our Mobile Energy System Guide. To expand your robotics toolkit, explore our Accessories Collection, where you’ll find compatible arms, sensors, and more. For flexible robotics solutions, check out our Flexible Charging Kits, designed to work seamlessly with the myGripper H100.

The myGripper H100 is a three-finger dexterous robotic hand developed by Elephant Robotics specifically designed for applications in robotics research, education, and other related scenarios. It can be used for and . Equipped with 6 high performance digital servo motors, the H100 enables multi-parameter control, including output torque, motion speed, and absolute position. It supports high-frequency 100Hz communication, allowing real-time status monitoring during grasping operations, fully meeting the data collection needs of research environments.
myGripper H100 Video
Application Scenarios

Gestural Interaction
Enables actions such as giving a thumbs-up, waving, and gesture control in collaboration with robots.

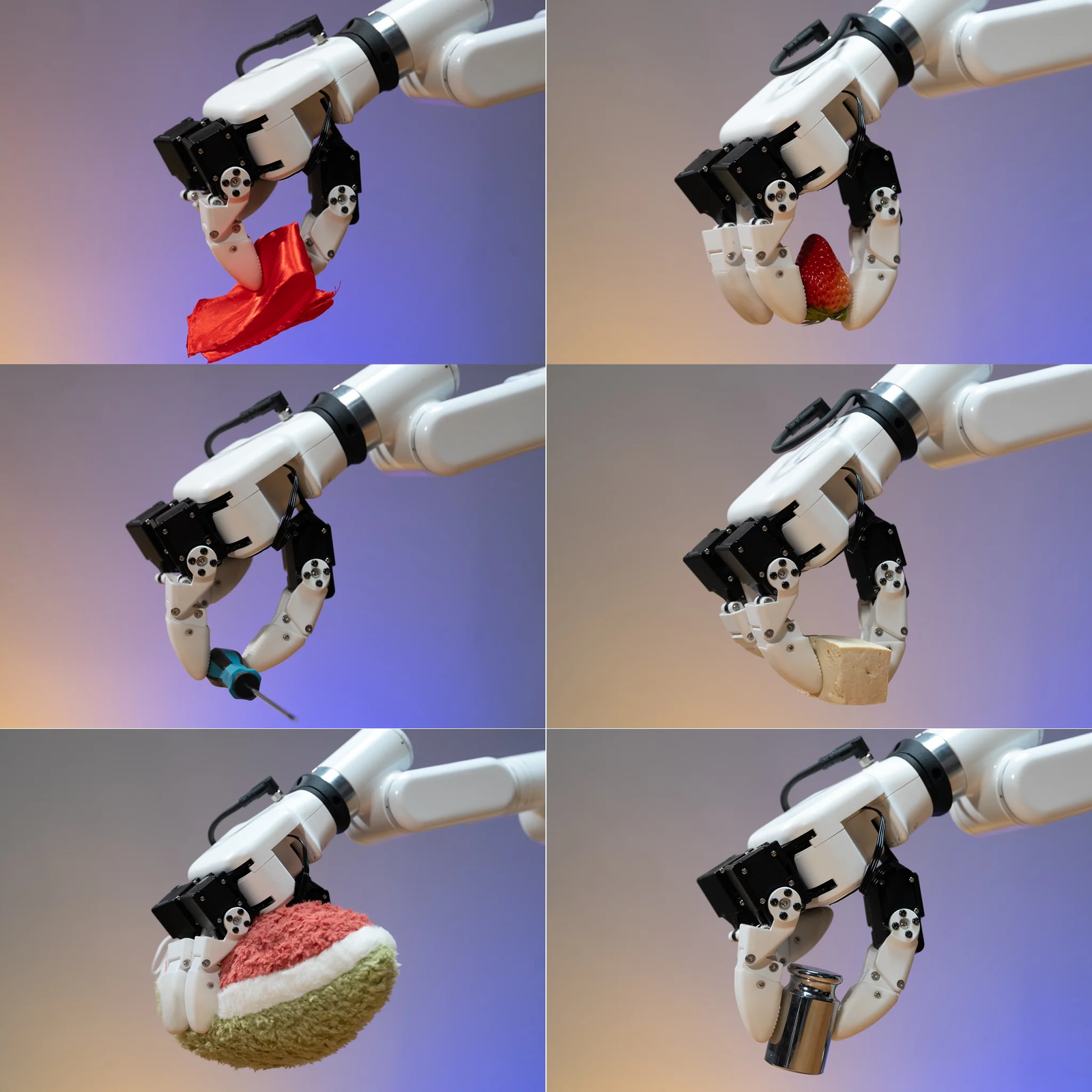
Precise Gripping
Capable of handling various objects, including fruits, food, tools, and equipment.

Experimental Operations
Performs precision tasks and demonstrations in laboratory settings.

Teaching Demonstrations
Ideal for hands-on learning in robotics courses.
Product Highlights

Product Package
| What’s Included? | Three-Finger Dexterous Hand *1 |
|---|---|
| Dual-Head 8-Pin Aviation Connector Cable *1 | |
| Extension Cable *1 | |
| USB to 485 Module *1 | |
| 8-Pin Aviation Connector with 2m Extension Cable *1 | |
| USB Data Cable *1 |
Software Programming
The myGripper H100 offers a standardized robot driver library that can be easily downloaded and installed via PyPI. It supports querying joint angles, encoder positions, speed data, and more. Compatible with both ROS1 and ROS2, it includes support for the RVIZ simulation environment, allowing users to display the robot arm’s state and collect real-time data.

Product Parameters
| Name | myGripper H100 | ||||
|---|---|---|---|---|---|
| Payload | 500g | ||||
| Self-Weight | 780g | ||||
| Stroke (Diameter) | 0 ¨C 130mm | ||||
| Motion Speed | 60 degrees per second per joint | ||||
| Number of Fingers | 3 fingers (corresponding to the human thumb, index finger, and ring finger) | ||||
| Movable Joints | 6 | ||||
| Motor Type | Servo motor supporting current, position, and speed control | ||||
| Lifespan | 1,000,000 cycles or more | ||||
| Electrical Interface | M8 Pin aviation connector | ||||
| Power Parameters | 24V, 2A | ||||
| Communication Interface | RS485 | ||||
| Communication Speed | Above 50Hz | ||||
| Data Format | Hexadecimal (Hex), 8N1 | ||||
| Protocol Type | MODBUS | ||||
| Programming Language | Python | ||||
| Main Control Chip | ESP32 | ||||
| Main Control Parameters | 240MHz dual-core, 600 DMIPS, 520KB SRAM, Wi-Fi, dual-mode Bluetooth | ||||
| Compatible Models |
| ||||
| Recommended Control Methods |
|

Reviews
There are no reviews yet.